- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

En artikel för att förstå skillnaden mellan stegmotorer och servon och servomotorer
I. Skillnader mellan stegmotorer och servon och servomotorer
Stegmotor: är den elektriska pulssignalen till vinkelförskjutning eller linjeförskjutning av stegmotorns stegmotordelar med öppen slinga. Enkelt uttryckt förlitar den sig på den elektriska pulssignalen för att styra vinkeln och antalet varv. Så han litar bara på pulssignalen för att avgöra hur mycket rotation. Eftersom det inte finns någon sensor kan stoppvinkeln avvika. Den exakta pulssignalen minimerar dock avvikelsen.
Servomotor: lita på servostyrkretsen för att styra motorns hastighet, genom sensorn för att styra rotationspositionen. Så positionskontrollen är mycket exakt. Och rotationshastigheten är också variabel.
Servo (elektronisk servo): Huvudkomponenten i servo är servomotorn. Den innehåller servomotorstyrkrets + reduktionsväxelsats. Åh ja, servomotorn har ingen reduktionsväxel. Och servo har en reduktionsväxelsats.
I fallet med en gränsservo förlitar den sig på en potentiometer under den utgående axeln för att bestämma roderarmens styrvinkel. Servosignalkontrollen är en pulsbreddsmodulerad (PWM) signal, där en mikrokontroller enkelt kan generera denna signal.
II. Stegmotor grundprincip
Hur det fungerar:
Normalt är en motors rotor en permanentmagnet, och när ström flyter genom statorlindningarna producerar statorlindningarna ett vektormagnetiskt fält. Detta magnetfält kommer att driva rotorn att rotera med en vinkel, så att riktningen för paret av magnetfält hos rotorn kommer att vara densamma som riktningen för statorns magnetfält. När statorns vektormagnetiska fält roterar med en vinkel. Rotorn roterar också i en vinkel med detta magnetfält. För varje elektrisk ingångspuls roterar motorn ett vinkelsteg framåt. Dess utgående vinkelförskjutning är proportionell mot antalet ingångspulser, och dess rotationshastighet är proportionell mot frekvensen av pulserna. Genom att ändra ordningen i vilken lindningarna aktiveras, reverserar motorn. Därför kan antalet och frekvensen av pulser och ordningen för att aktivera lindningarna i varje fas av motorn styras för att styra stegmotorns rotation.
Principen för värmealstring:
Vanligtvis ser alla typer av motorer, interna är järnkärna och lindningsspole. Lindningsresistans, effekt kommer att producera förlust, förluststorlek och resistans och strömmen är proportionell mot kvadraten, vilket ofta kallas kopparförlust, om strömmen inte är standard DC- eller sinusvåg, kommer också att producera harmoniska förluster; kärnan har hysteres virvelström effekt, i det växelmagnetiska fältet kommer också att producera förlust, storleken på materialet, ström, frekvens, spänningsrelaterad, vilket kallas järnförlust. Kopparförlust och järnförlust kommer att manifesteras i form av värmegenerering, vilket påverkar motorns effektivitet. Stegmotor strävar i allmänhet efter positioneringsnoggrannhet och vridmomentutmatning, effektiviteten är relativt låg, strömmen är generellt sett större och de harmoniska komponenterna är höga, strömfrekvensen växlar med hastigheten och förändringen, så stegmotorer har i allmänhet en värmesituation, och situationen är allvarligare än den allmänna AC-motorn.
III. Roderkonstruktion
Servot består huvudsakligen av ett hus, ett kretskort, en drivmotor, en växelreducerare och ett positionsdetekteringselement. Dess arbetsprincip är att mottagaren skickar en signal till servo, och IC på kretskortet driver den kärnlösa motorn att börja rotera, och kraften överförs till svängarmen genom reduktionsväxeln, och samtidigt skickar positionsdetektorn en signal tillbaka för att avgöra om den har kommit till positioneringen eller inte. Positionsdetektorn är faktiskt ett variabelt motstånd. När servo roterar kommer motståndsvärdet att ändras i enlighet med detta, och rotationsvinkeln kan kännas genom att detektera motståndsvärdet. Generell servomotor är en tunn koppartråd lindad runt en trepolig rotor, när strömmen flyter genom spolen kommer att generera ett magnetiskt fält, och rotormagnetens periferi för att producera repulsion, vilket i sin tur genererar rotationskraften. Enligt fysiken är ett föremåls tröghetsmoment direkt proportionellt mot dess massa, så ju större massa föremålet som ska roteras är, desto större kraft krävs. För att uppnå snabb rotationshastighet och låg strömförbrukning är servot tillverkat av tunna koppartrådar tvinnade till en mycket tunn ihålig cylinder, som bildar en mycket lätt ihålig rotor utan poler, och magneter placeras inuti cylindern, som är den ihåliga koppmotorn.
För att passa olika arbetsmiljöer finns servon med vattentät och dammtät design; och som svar på olika belastningskrav finns det plast- och metallväxlar för servon, och metallväxlar för servon har generellt högt vridmoment och hög hastighet, med fördelen att kugghjulen inte kommer att flisas på grund av för stora belastningar. Servon av högre kvalitet kommer att utrustas med kullager för att göra rotationen snabbare och mer exakt. Det är skillnad på ett kullager och två kullager, självklart är de två kullagren bättre. De nya FET-servon använder huvudsakligen FET (Field Effect Transistor), vilket har fördelen av lågt internt motstånd och därför mindre strömförlust än vanliga transistorer.
IV. Servo funktionsprincip
Från pwm-vågen in i den interna kretsen för att generera en förspänning, kontaktorgeneratorn genom reduktionsväxeln för att driva potentiometern att röra sig, så att när spänningsskillnaden är noll, stannar motorn, för att uppnå effekten av servo.
Protokollen för servo PWM är alla desamma, men de senaste servon som visas kan vara annorlunda.
Protokollet är generellt: hög nivå bredd i 0,5 ms ~ 2,5 ms för att styra servo att svänga genom olika vinklar.
V. Hur servomotorer fungerar
Bilden nedan visar en servomotorstyrkrets gjord med en effektoperationsförstärkare LM675, och motorn är en DC-servomotor. Som framgår av figuren tillförs effektoperationsförstärkaren LM675 med 15V, och 15V-spänningen läggs till i-fasingången på operationsförstärkaren LM675 genom RP 1, och utspänningen från LM675 läggs till ingången på servomotorn. Motorn är utrustad med en signalgenerator för hastighetsmätning för realtidsdetektering av motorns varvtal. Faktum är att hastighetssignalgeneratorn är en slags generator, och dess utspänning är proportionell mot rotationshastigheten. Spänningsutmatningen från hastighetsmätsignalgeneratorn G återkopplas till operationsförstärkarens inverterande ingång som en hastighetsfelsignal efter en spänningsdelarkrets. Spänningsvärdet inställt av hastighetskommandopotentiometern RP1 adderas till operationsförstärkarens infasingång efter spänningsdelning med R1.R2, vilket är ekvivalent med referensspänningen.
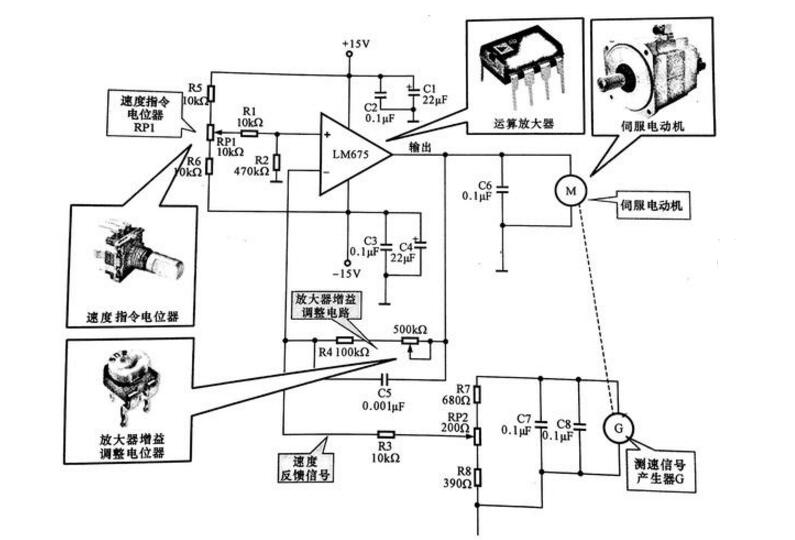
Styrschema för servomotor
Servomotor: Indikeras med bokstaven M för servomotor, det är kraftkällan för drivsystemet. Operationsförstärkare: betecknad med kretsnamnet, dvs LM675, är en förstärkardel i servostyrkretsen som tillhandahåller drivströmmen för servomotorn.
Hastighetskommandopotentiometer RP1: Ställer in referensspänningen för operationsförstärkaren i kretsen, dvs hastighetsinställning. Potentiometer för justering av förstärkarförstärkning RP2: Används i kretsen för att finjustera förstärkarens förstärkning respektive storleken på hastighetsåterkopplingssignalen.
När motorns belastning ändras, ändras också spänningen som matas tillbaka till operationsförstärkarens inverterade ingång, dvs när motorns belastning ökas, minskar hastigheten och utspänningen från hastighetssignalgeneratorn minskar också, så att spänningen vid operationsförstärkarens inverterade ingång minskar, och skillnaden mellan denna spänning och referensspänningen ökar utgångsspänningen för förstärkaren. Omvänt, när belastningen blir mindre och motorhastigheten ökar, stiger utspänningen från hastighetsmätsignalgeneratorn, återkopplingsspänningen som läggs till den inverterade ingången på operationsförstärkaren ökar, skillnaden mellan denna spänning och referensspänningen minskar, operationsförstärkarens utspänning minskar och motorhastigheten minskar i enlighet med detta, så att rotationsvärdet automatiskt kan ställas in i enlighet med detta.